Team 75 Robotics
FRC Robotics has been a huge part of my life in high school where I have spent countless hours tinkering with designs, mechanisms, and code. The ability to learn and have access to hands-on opportunities in the Team 75 warehouse has provided me with experiences and skills I likely would have never gotten if I had not joined the team.
Mechanical
When I joined the team as a freshman I chose mechanical as the department I wanted to work in. Mechanical is responsible for creating the physical form of the designs created by the design team. During my time on the team I have led multiple groups in the creation of several robot parts. For example, in 2024 I led the assembly of the game-piece shooter as well as the mounting of it onto the robot. Along with this, I have helped in putting together and fixing several other parts of the robot while also carrying out preventative maintainance on the robot during competitions.
Design
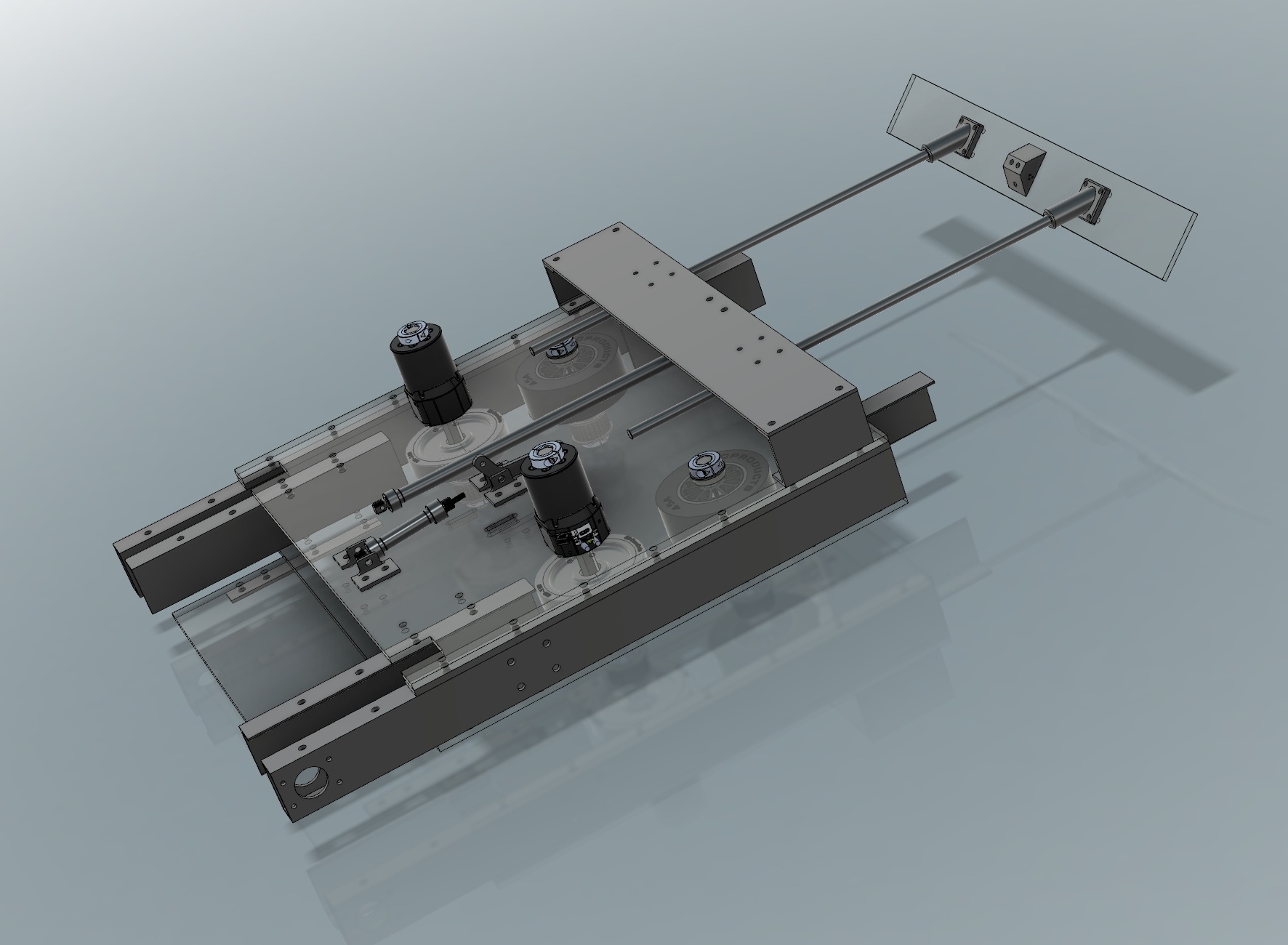
Although I didn't originally join the design department, I always wanted to contribute to the design of the robot as I had been familiar to Computer Aided Design as I had cadded prior to joining the team since I also have a 3d printer. My contributions to the design of the robot weren't really significant until the 2024 season in which I designed the entire shooter on our robot as well as an unconventional, yet effective, double piston mechanism to provide 3 different shooting angles. The shooter was overall a great success as it was complemented by multiple teams and it provided lots of consistency and scoring power for the robot.
Programming
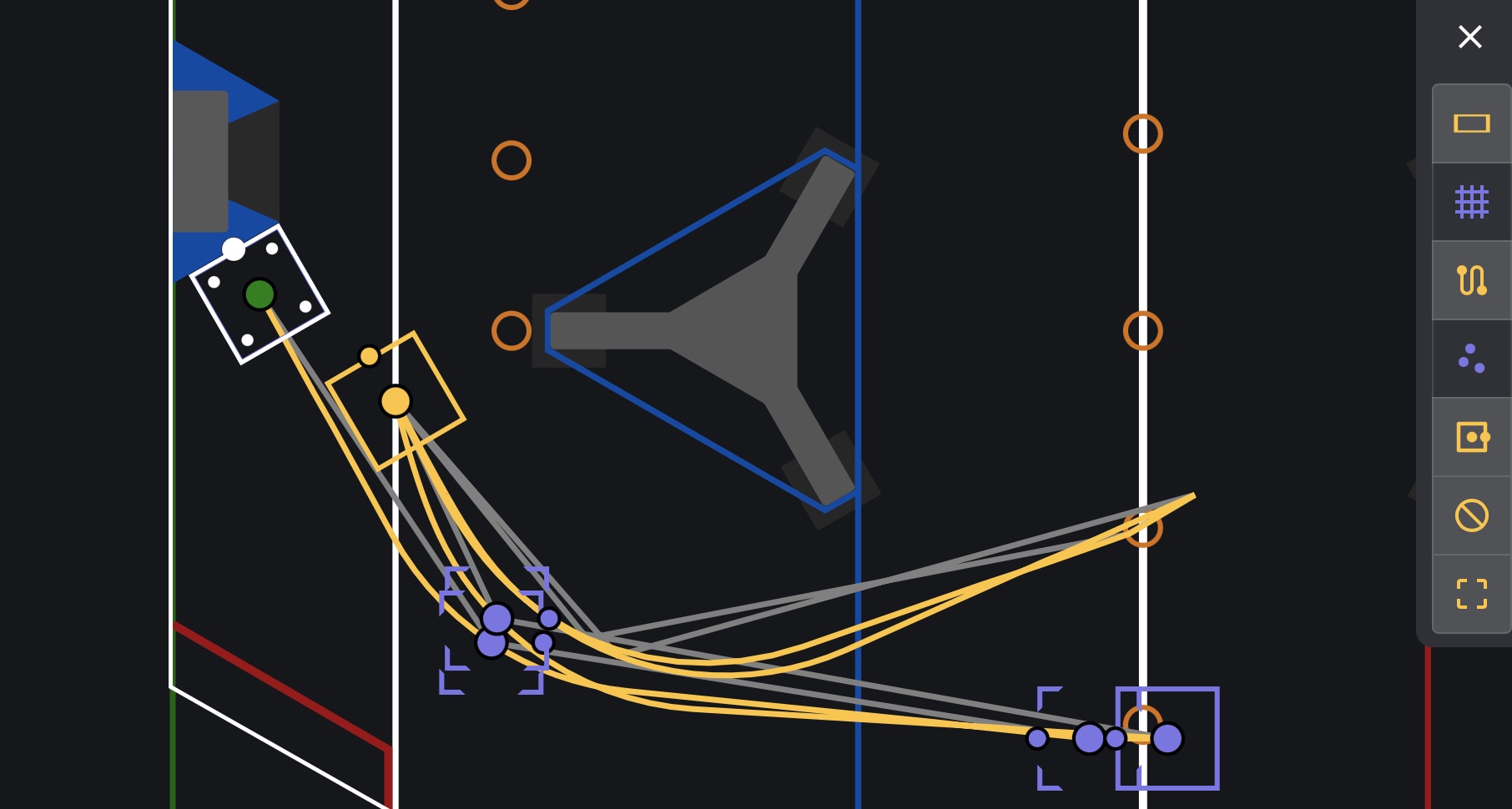
Even though when I joined the team I probably was most fit to join to the programming department, I chose to steer away from the software side to grow my other skills. Regardless, I eventually came back to help the programming department when I could. Specifically, I helped out in the autonomous part of the programming in the 2024 season as that's where we seemed to struggle the most. Along with the help of a few other members, I implemented and calibrated a program called Choreo to generate paths for the robot to carry out in the autonomous period based on what is created in a GUI. This proved to be very effective and added even more consistency and scoring ability to our robot.